Нвидиа-овиот роботички екосистем: Физичка вештачка интелигенција и Jetson T4000 со целосна ширење
Nvidia, во рамките на CES 2026 се фокусираше на основните модели во роботиката, симулациските алатки и летните компоненти, јасно демонстрирајќи ја својата цел да стане платформа за општа намена во роботиката. Компанијата се обидува да воспостави слична улога како што Android ја има во светот на паметните телефони и во овој контекст го претстави новиот роботски модел и платформата Jetson T4000 заедно со глобалните деловни партнерi како Boston Dynamics, Caterpillar, Franka Robotics, Humanoid, LG Electronics и NEURA Robotics. Извршниот директор Jensen Huang изјави дека компанијата сега се фокусира на „физички“ вештачки интелигенцii, надминувајќи ги претходните говори за облачно базираниот AI. Екосистем од крај до крај за физички вештачки интелигенцii во рамките на CES, покажува дека е воспоставена целосна инфраструктура за AI.

Основните модели што се достапни преку Hugging Face имаат за цел да направат роботите системи кои може да извршуваат различни задачи и да се прилагодуваат во различни средини наместо само да извршуваат едноставни задачи. Меѓу моделите што се нудат, се наоѓаат Cosmos Transfer 2.5 и Cosmos Predict 2.5, кои се користат за генерирање на податоци во симулацискиот свет и за оценка на политики на роботи. Визионо-јазичниот систем за логика Cosmos Reason 2 е во срцето на процесите за визуално препознавање и пренесување во реалниот свет. За хуманоидни роботи, прилагоѓен е Isaac GR00T N1.6, кој ги користи Cosmos Reason како мозок за соработка со неговите тела и за манипулација со предмети.
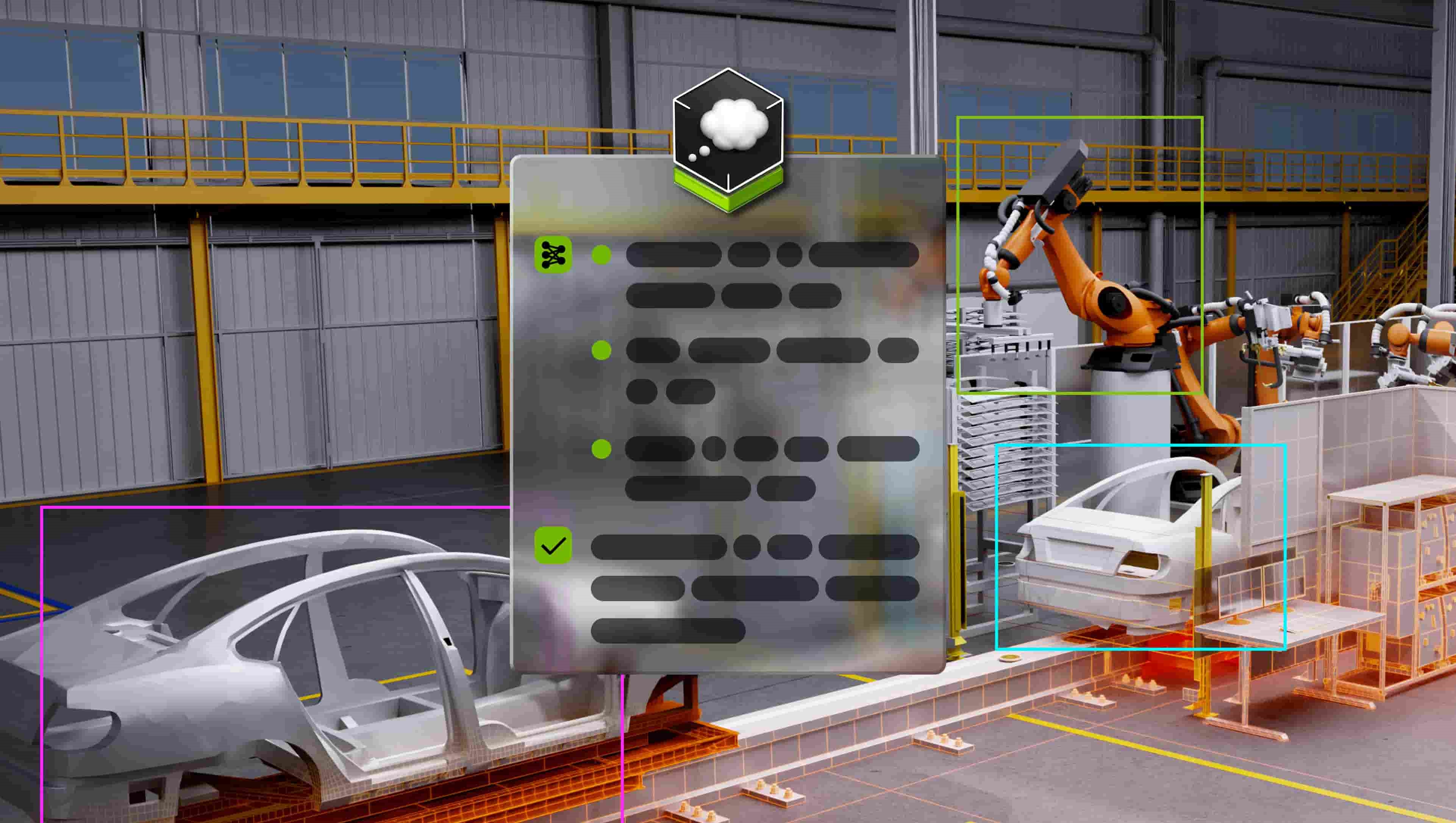
Отворениот симулациски Framework Isaac Lab-Arena, кој е достапен како отворен код преку GitHub, се истакнува меѓу новитетите. Оваа платформа овозможува безбедно тестирање на роботските вештини во виртуелен свет пред реалната употреба и помага да се намалат трошоците и ризиците од тестирањето во реална средина. Платформата собира стари ресурси, сценарија за задачи и алатки за обука во единствен систем, и има за цел да создаде стандарден заеднички критериум за оценка.
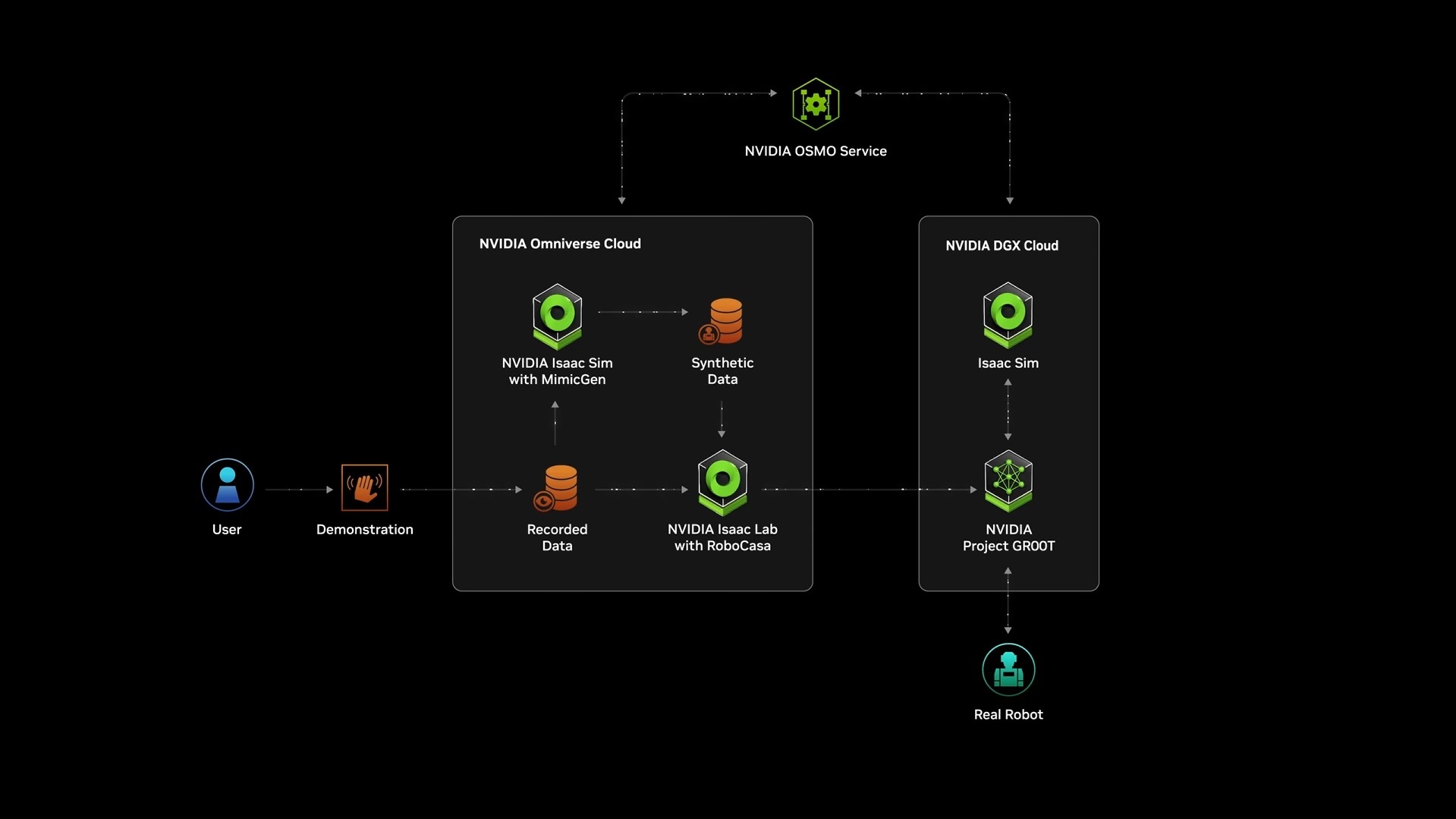
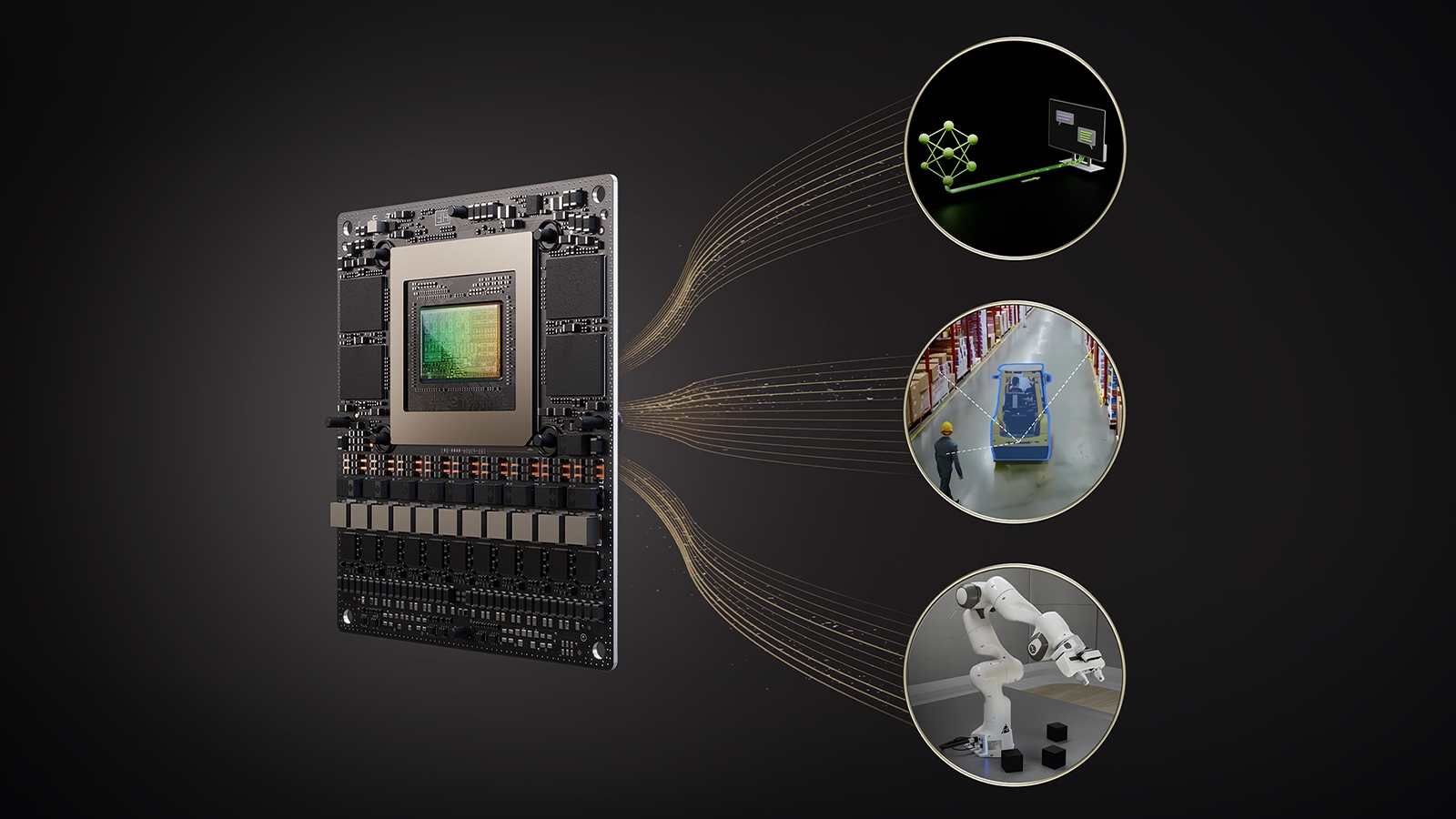
Целосната инфраструктура со OSMO и Jetson T4000 е создадена од Nvidia, каде що платформата за командно управување ги интегрира работењето на моделот и создавањето на податоци во десктоп и облачни услови. Од хардверска страна, Jetson T4000 работи врз основа на архитектурата Blackwell, и како дел од новата серија Thor, ја задржува потрошувачката на енергија во опсегот од 40 до 70-watt, нуди 1200 ТФлопс AI процесирање и 64 GB RAM. За пошироко распространување на роботиката, сработена е длабока соработка со Hugging Face, преку која се интегрираа Isaac и GR00T технологиите во LeRobot еко-системот. На овој начин, повеќе од два милиона развивачи од Nvidia и заедницата од 13 милиони од Hugging Face се поврзуваат во еден систем. Reachy 2, човечки робот, сега можи да работи со Jetson Thor чипот, додека разработувачите можат да ги тестираат отворените модели без да зависат од затворени или тetiцирани системи.
Отворени модели и растечкиот базен со податоци продолжуваат да ја промовираат стратегијата на Nvidia, која опфаќа не само роботика, туку и широка палета на други сектори. Овој пристап вклучува Nemotron, Cosmos, Alpamayo, Isaac GR00T и Clara програмски пакети, и се проширува од автономните возила и биомедицинската истражувања до физички AI. Покрај отворените образовни рамки, се развиваат огромни бази на податоци како 10 трилиони јазични токени за обучение, 500.000 роботски следења на движења, 455.000 протеински структури и 100 терабајти сензорски податоци за возила. Големите компании како Bosch, Salesforce, ServiceNow, Palantir, Uber и Franka Robotics, продолжуваат да ги користат овие отворени модели во своите производи и решенија.